國立中山大學/莊偉良教授
解決痛點
- 解決現行衛星與雷達在海域、港區及陸域水體監測上普遍面臨的訊噪比偏低與最小辨識尺度受限等問題,提供遠優於傳統遙測的近場高解析油污辨識能力。
- 感測設備量體輕小、功耗低,已完成與商用多任務無人機的搭載整合,並建立成熟的系統化整合技術。
- 自主研發之軟體平台架構於自有核心演算法,可依任務需求進行模組化擴充,並支援多源跨感測器資料融合,以提升影像判釋之準確性與穩健性。
- 突破傳統空拍機僅能依賴可見光的限制,成功實現夜間及低光環境下的穩定、可靠油污偵測能力。
- 掌握關鍵技術,可快速延伸至特定應用,除搭載於無人機之外,亦可提供手持式近距離偵測,或安裝於固定點執行全天候、長時間的連續監測。
技術簡介
- 系統核心:無人飛行系統、長波紅外偏振成像感測器與自主研發軟體。
- 關鍵感測技術:量化油膜與水體在熱輻射偏振特性上的差異,並透過自研演算法解析熱偏振訊號,計算線性偏振度,大幅提升油污影像相較背景水面的訊噪比,有效強化油膜可視度與判釋可靠度。
- 無人飛行載具平台:使用通過中階資安認證之工業級六旋翼無人機,具備抗 7 級風能力、雙電池冗餘設計及 5 公里以上的長距離傳輸能力,適應海域作業環境。
- 自主研發軟體:開發OilWATCH Stream & View(OSV)軟體,具備即時影像串流、參數調整、自動化油污影像分割演算法、去噪訊處理、偽影濾除、正射投影、AI輔助辨識及 ROI(興趣區域)設定,並支援即時警告與通報功能。
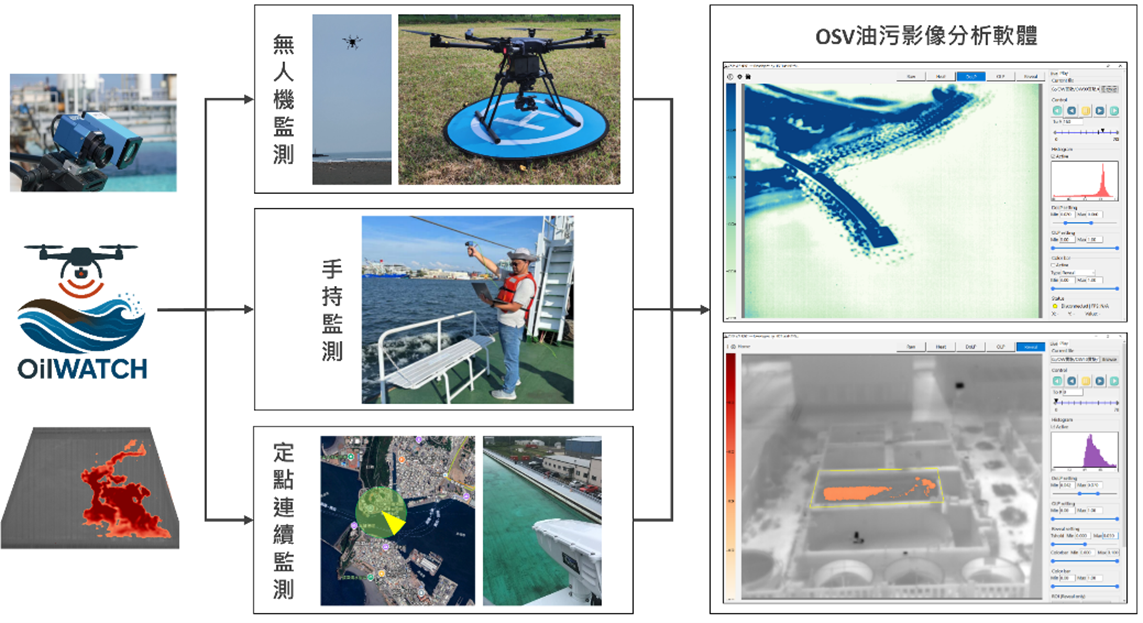
▲圖說:OilWATCH多元應用架構與OSV軟體
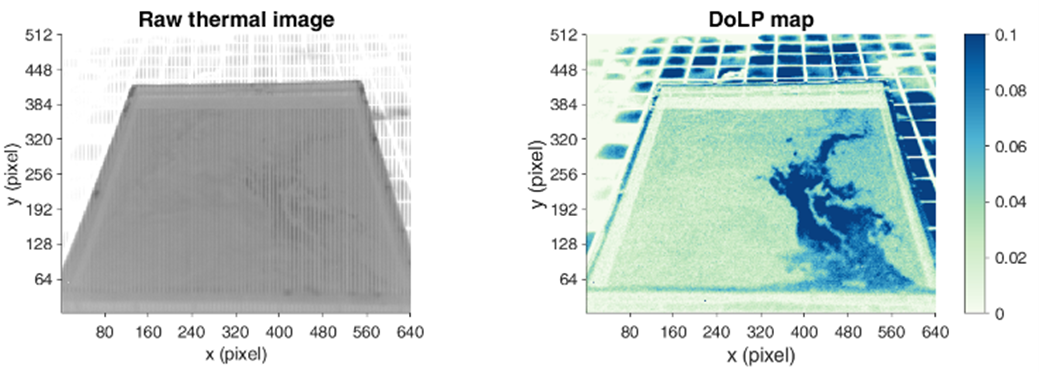
▲圖說:一般熱影像(左)與線性偏振度(右)對油污之偵測效果
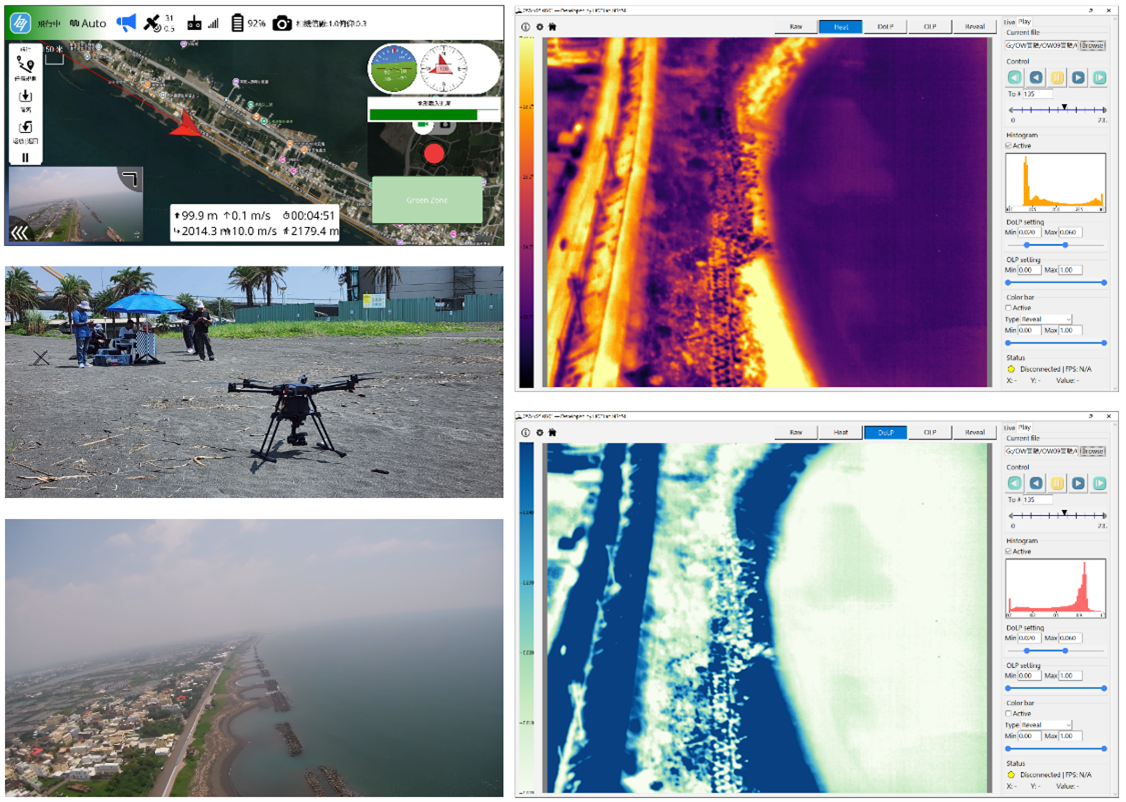
▲圖說:大鵬灣海岸無人飛行系統海測
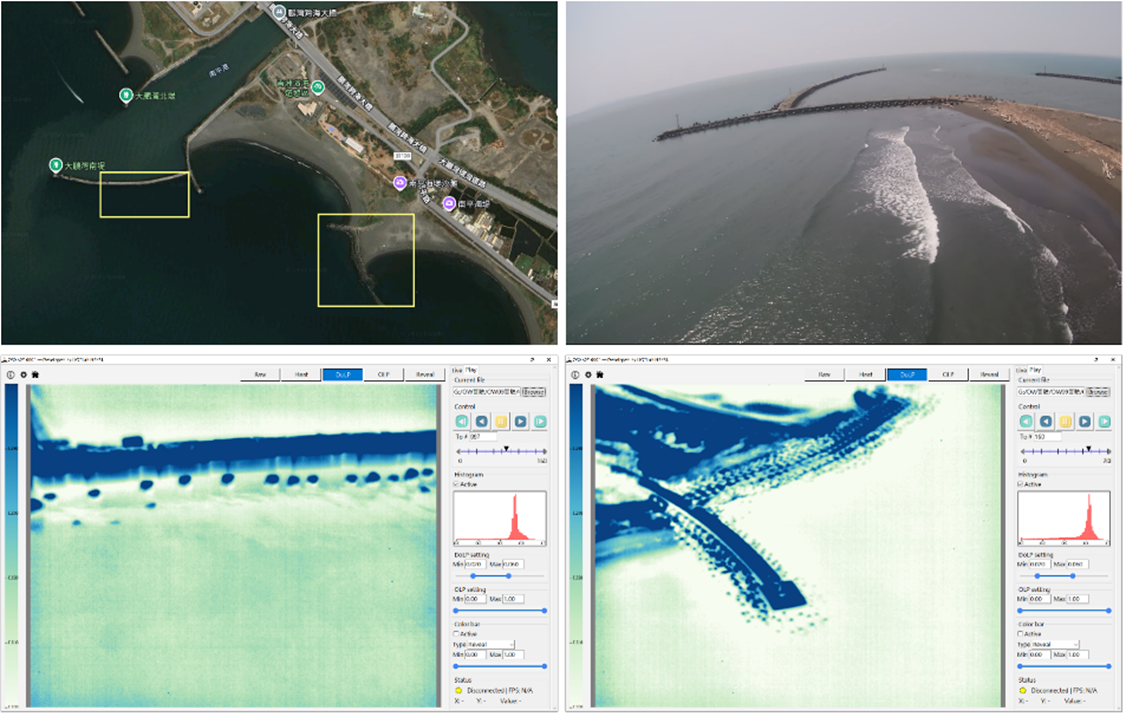
▲圖說:大鵬灣海岸油污偵測任務演練

▲圖說:動態油污擴散偵測成果
應用案例
相關連結
無
專利名稱證號
無
技術產學合作或技轉單位
產學合作單位:慧技科學、璿元科技
獲獎紀錄
無
技術聯絡人
國立中山大學 前瞻產業聯絡中心
連絡電話:07-5250165
聯絡信箱:gloria@mail.nsysu.edu.tw
