﹤Smart Agriculture﹥Commercial Platform for Path Detection and Self Spinning Field Autonomous Vehicle
National Pingtung University of Science and Technology / Prof. Chung Liang Chang
Pain Points Solved
This technology addresses key limitations of conventional field carriers, including fixed wheel spacing, poor adaptability to different furrow widths, limited maneuverability in ridge cultivation, and unstable guidance accuracy in outdoor fields. By integrating a modular vehicle platform, adjustable wheel span, four wheel drive, independent steering, RTK GNSS positioning, and machine vision based path detection, the system improves navigation precision, reduces manual burden, and enhances adaptability and commercialization potential for smart agricultural operations.
Technology Introduction
This technology integrates a modular field autonomous vehicle platform with a machine vision assisted path detection method. The vehicle platform adopts a modular architecture with adjustable wheel span, four wheel drive, independent steering, small turning radius, and self spinning maneuverability, and it can serve as a carrier for different agricultural operation modules. The sensing and control system is centered on RTK GNSS centimeter level positioning and uses visual recognition of crops, ridges, and irrigation lines, together with deep convolutional neural networks, for path inference and deviation correction. The integrated system has demonstrated stable guidance performance and can serve as a key commercial platform for autonomous field mobility and precision agricultural operations.
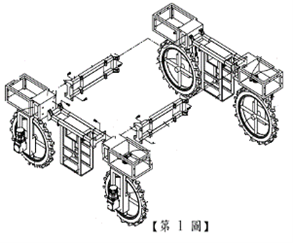
▲Figure 1. Modular Architecture (Patent No. I706715)
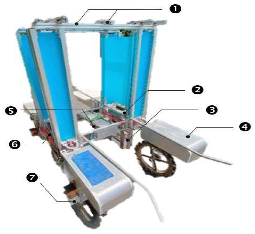
▲Figure 2. Prototype of the Vehicle Platform
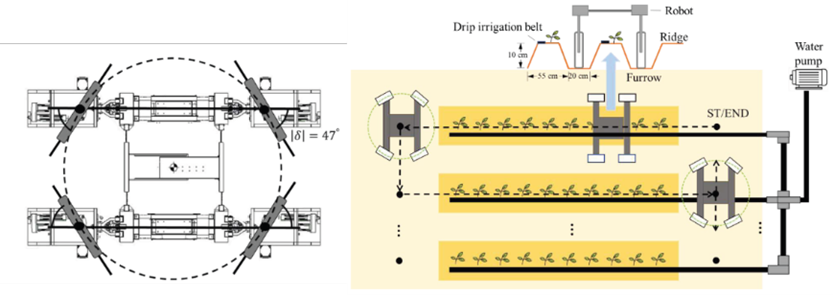
▲Figure 3. Specialized On-Spot Pivoting Design ▲Figure 4. Operation Mode for Ridge Cultivation
Caption:
The system adopts a modular architecture, allowing adjustment of the axle span according to width requirements (Figures 1 and 2). It is equipped with a four-wheel drive system and independent steering mechanisms. The design features a small turning radius and incorporates a specialized on-the-spot pivoting capability (Figure 3). It is suitable for ridge cultivation environments, providing a wide span and high torque performance (Figure 4). The total weight of the platform is 440 kg. The system is integrated with RTK-GNSS for centimeter-level high-precision positioning, along with vision-assisted path detection technology.
Application Examples
1. Autonomous mobility and precision guidance in ridge based and furrow based cultivation fields.
2. Mobile carrier platform for weeding, spraying, inspection, sensing, and other agricultural implements.
3. Smart agriculture deployment for precise field operations and intelligent farm management.
Related Links
None
Patent Name and Number
1. Modular Carrier, Invention Patent No. I706715.
2. Intelligent Farming Device and Control Method Thereof, Invention Patent No. I659192.
Industry-Academia / Tech Transfer Partner
None
Honors and Awards
None
Technical Contact
Joan Li, Project Manager
National Pingtung University of Science and Technology
Tel: +886 8-7703202 ext. 6571
Email: joanli@mail.npust.edu.tw