
﹤智慧農業﹥路徑檢測及自迴旋型田野自走車之商用平台
解決痛點
本技術針對傳統田間載具輪距固定、難以適應不同田畦寬度,以及在壟作環境中轉彎不易、定位誤差大、導引穩定性不足等問題提出整合解決方案。透過模組化車體、可調式輪距、四輪驅動與獨立轉向機構,可依不同作物栽培型式與農機掛載需求快速調整平台配置;再結合 RTK GNSS 公分級定位與機器視覺路徑檢測,可有效提升田間行進精度、降低偏移與人工操作負擔,並強化載具於複雜田間環境下之適應性、可靠性與商用化潛力。
技術簡介
本技術為一套結合「模組化田野自走車平台」與「機器視覺輔助路徑檢測方法」之智慧農業移動系統。平台端採模組化載具架構,可依田畦寬度調整車軸跨度,具四輪驅動、獨立轉向、小轉彎半徑與原地迴旋能力,並可承載不同作業模組。感知與控制端則以 RTK GNSS 為高精度定位核心,搭配植株、田埂及灌溉線等田間特徵之視覺辨識,並結合深度卷積神經網路進行路徑推定與偏差修正。整體系統已驗證具備穩定導引能力,可作為田間自主行走、精準作業與智慧農機商品化之關鍵平台。
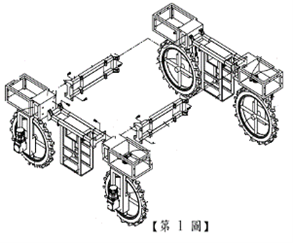
▲圖1:架構模組化(專利號碼:I706715)
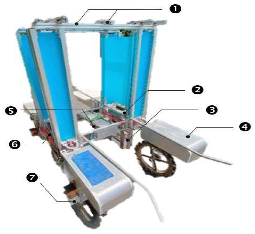
▲圖2:載具平台原型機
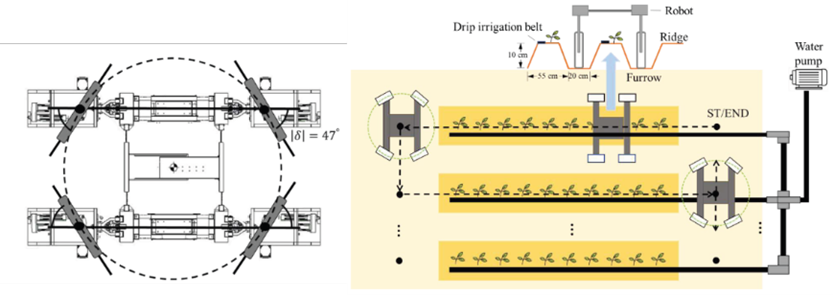
▲圖3:特殊原地迴旋設計 ▲圖4:壟作栽培的運行方式
圖說:架構模組化,依寬度需求調整車軸跨度(圖1, 2);四輪驅動與獨立轉向機構;轉彎半徑小,特殊原地迴旋設計(圖3);壟作栽培環境的大跨度高扭力(圖4);機體總重440 Kg;具備RTK-GNSS的公分級高精度定位;視覺輔助之路徑檢測技術。
應用案例
1. 應用於壟作與畦作環境之自主行走與精準導引;
2. 可作為除草、噴施、巡檢、感測監測或其他農機具之移動載台;
3. 適合導入智慧農業場域,作為高精度田間作業與智慧化管理之商用平台。
相關連結
無
專利名稱證號
1. 模組化載具,發明專利 I706715。
2. 智能農耕裝置及其控制方法,發明專利 I659192。
技術產學合作或技轉單位
無
獲獎紀錄
無
技術聯絡人
國立屏東科技大學 李秀珍專案經理
連絡電話:08-7703202 ext. 6571